NEWS
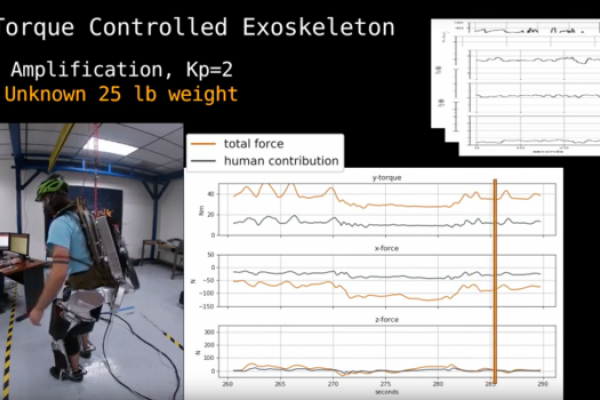
New Algorithm and Exoskeleton Hardware for Full Body Worker Strength Augmentation
There are some recent results in human strength amplification control for semi-active multi-contact exoskeletons, using a 8-powered-4-passive-DOF lower body exoskeleton from Apptronik Systems.

UT Austin Robotics Researcher speaks at Austin Central Library
Robots have long fascinated humans for their amazing potential, but this is also a very real industry.
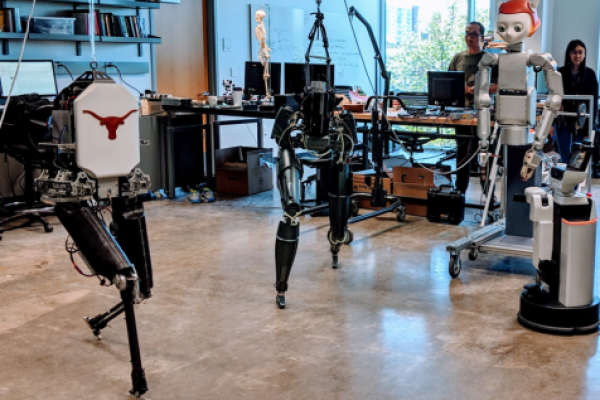
$2.7M Grant Funds Research on Intelligent Robots That Work Naturally with Humans
In the future, your co-worker might be a robot.
Aspiring mechanical engineers at UT Austin creating robots for the present and future
Robots are meant to make our jobs easier, but there are many questions about how we are supposed to interact with robots and how they will interact with us.

International Panel at UK's Robotics week
Dr. Mitch Pryor spoke and participated in the International Panel at UK's Robotics week with Stephen Hart from TRACLabs and Ron Diftler who is the branch chief for robotics at NASA JSC.

Roboticist Andrea Thomaz is one of Fast Company's Most Creative People
In September 2018, her company launched a five-hospital beta trial of Moxi, a hospital robot assistant that completes non-patient-facing tasks such as gathering and delivering supplies and lab samples.

Peter Stone wins the Minnie Stevens Piper Teaching Award
Peter Stone, a professor of computer science at The University of Texas at Austin, has won the Minnie Stevens Piper Teaching Award, which celebrates outstanding postsecondary teaching.

Construction begins on Anna Hiss Gym to house robotics programs
Last week, construction began on the Anna Hiss Gymnasium to house UT robotics programs.
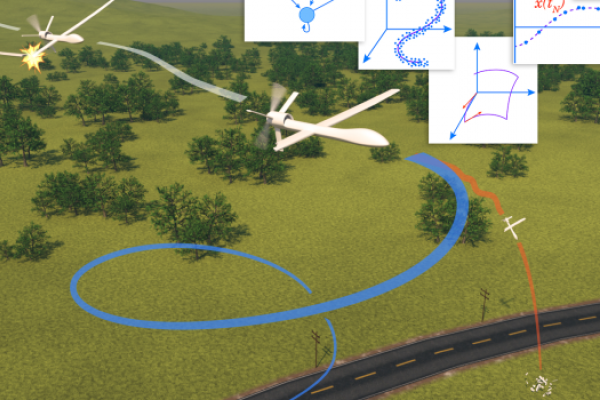
Ufuk Topcu Leads $7.5 Million Project to Create Truly Autonomous Systems
$7.5 million Multidisciplinary University Research Initiative (MURI) project aimed at developing artificial intelligence for UAVs.

Scott Niekum wins Career Award
Scott Niekum - along with three other UTCS professors—Vijay Chidambaram, Simon Peter, and Eric Price—have won the National Science Foundation (NSF) Faculty Early Career Development award for 2018.

Peter Stone Interview
Peter Stone was interviewed for Manuel Sagars' upcoming documentary on "Digital Transformation." You can watch the interview or read the transcript

Andrea Thomaz wins IEEE Young Professional Award
Dr. Andrea Thomaz was awarded the IROS Toshido Fukuda Young Profressional Award for Outstanding Contributions to Human Robot Interaction

Reinforcement Learning Key to Championship Soccer
Forget about robots stealing your job. Peter Stone is working on robots who can steal Ronaldo’s job.
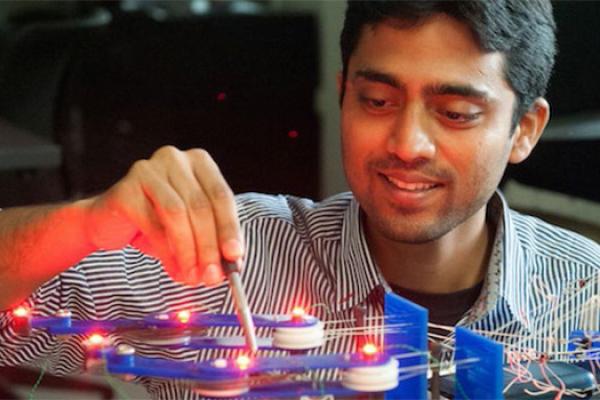
Students win Best Robotic Manipulation Award at ICRA 2017
A paper led by a UT graduate student Prashant Rao from the ReNeu Robotics Lab has won the ‘Best Robotics Manipulation Award’ at ICRA 2017

Scientists Imbue Robots with Curiosity
UT Professor Peter Stone is featured in this article from the AAAS Science Magazine
UT Austin announces Robotics Showcase Event!
We invite you to join us to learn about UT's newly launched Robotics Consortium at the our kick-off showcase event (RSVP required).

Ufuk Topcu wins NSF CAREER Award
Ufuk Topcu, an assistant professor of aerospace engineering and engineering mechanics, is one of eight UT Austin professors selected by the National Science Foundation (NSF) to receive a 2017 Faculty Early Career Development (CAREER) Award.

UT Robotics Teams Join Forces for RoboCup@Home Standard Platform League
Professors Niekum, Thomaz, Sentis, Mooney, and Stone, along with their students and postdocs, are banding together to create a joint entry in the new RoboCup@Home Standard Platform League using the Toyota HSR robot.
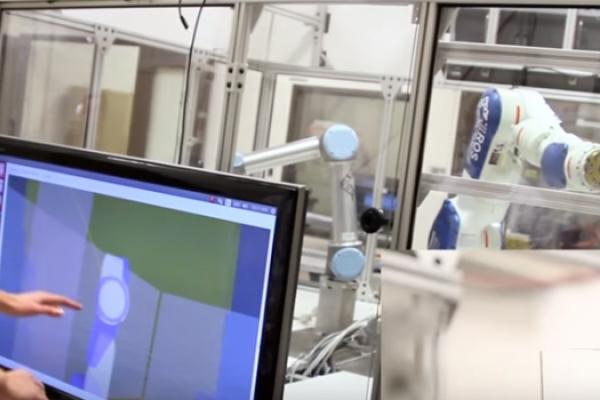
IEEE and ROS-Industrial feature NRG's gestural interface for high precision tasks
The Nuclear & Applied Robotics Group takes its hands-free interface for high precision on the road

Keeping It Simple: Engineering Students Invent Device to Improve Physical Therapy
In 2014 the Seton Brain and Spine Recovery Center had a problem. Their patients were performing shoulder exercises incorrectly and subjecting themselves to further injury. Dr. Sulzer and his students went straight to work to address the problem.