News
New Algorithm and Exoskeleton Hardware for Full Body Worker Strength Augmentation
There are some recent results in human strength amplification control for semi-active multi-contact exoskeletons, using a 8-powered-4-passive-DOF lower body exoskeleton from Apptronik Systems.
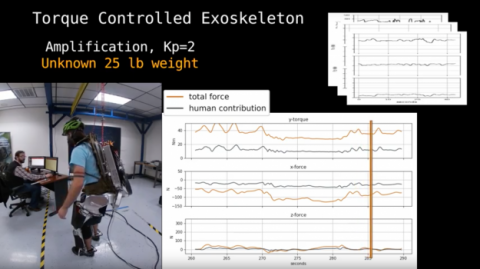
There are some recent results in human strength amplification control for semi-active multi-contact exoskeletons, using a 8-powered-4-passive-DOF lower body exoskeleton from Apptronik Systems. The system is designed for controls testing, and supports a modest payload of 25 lbs, with off-board power. Its low level actuators run a sophisticated disturbance observer based torque compensator, to deliver near zero impedance behavior (under some minimum output inertia requirements).
The controller uses a linear program to optimize the torques of the active joints in order to reduce the hip spatial force vector and foot-differential spatial force vector. This optimization problem is constrained in several ways. On top of this optimization problem, we apply biases to the desired value of the interaction torques to enable an active force feedback scheme, with a second order frequency domain compensator for each of the six degrees of freedom in a spatial force vector. Tuning these compensators, we avoid exciting the natural dynamics of the human and exoskeleton, allowing the human to be amplified without jeopardizing stability.